生成式模型本质上是一组概率分布。也就是说对于一个数据集,可以假设其都是从某个概率分布pdata中独立同分布取出的随机样本,如下图所示。
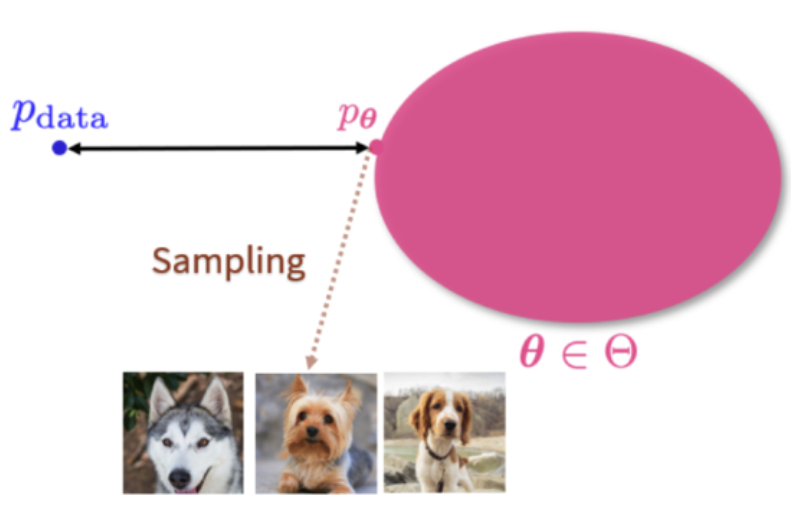
生成模型学习一个概率分布pθ,在推理时,在pθ上进行采样,就可以不断获取新数据。
但是,pdata未知,形式复杂,图像维度高,数据集的样本也有限,与自然分布存在偏差,例如下图,假设模型可以学到的参数空间为Θ,进行训练后,只能得到距离数据分布pdata最近的pθ,在此分布上采样获取新图像:
主流的生成流派有:
- 生成对抗网络(GAN):通过判别器和生成器相互博弈
- 变分自编码器(VAE):通过一个编码器将输入图像编码为特征向量,学习高斯分布的均值和方差,解码器将特征向量转换为图像
- 标准化流模型(NF):从简单分布开始,通过一系列可你的转换函数转换为目标分布
- 扩散模型:正向加噪+反向去噪
- 自回归模型:next-token预测
GAN由于训练不稳定,基本上很少用;
VAE(例如VQVAE)等不仅用在生成模型,频繁用在其它网络中(例如很多用于生成的自回归模型会用);
NF由于计算复杂,很少在实际中使用,但Flow matching受到其和扩散模型启发
扩散自不用多说,现阶段主流的生成形式
自回归由于训练比GAN稳定,比扩散简单,和transformer统一,也是一种新兴的方式,通常会利用VAE离散化
扩散原理
核心思想特别简单:先把清晰的目标慢慢 “模糊”(扩散过程),再学怎么把模糊的结果一步步 “还原”(逆扩散过程)。
符号定义:
x0:原始数据(清晰图像)
xt:第t步扩散的带噪数据(t=0是原始数据)
T:扩散总步数
βt:第t步的噪声强度,随时间变化,变化情况称为差异时间表,通常从1e-4逐步增加至2e-2
αt:1−βt,第t 步的保留系数
αt:aˉt=∏s=1tαt,累积保留系数
前向扩散
首先引入了一个马尔可夫链的加噪过程:
q(xt∣xt−1)=N(xt;1−βtxt−1,βtI)q(x1:T∣x0)=t=1∏Tq(xt∣xt−1)
前向扩散每一步对于数据加入噪声:
xt=αt⋅xt−1+1−αt⋅ϵt
其中,ϵt∼N(0,I)为第t步加入的高斯噪声
对于βt,原文中使用的是线性策略,但在OpenAI的Improved diffusion 中改进到了cosine策略(注意是根据xt和x0关系的公式想要αtˉ按照cos的形式),通过计算:
αˉ(t)=cos2(1+ss⋅2π)cos2(1+st+s⋅2π)
一般s=0.008,这个公式的好处在于αtˉ(0)=1,逐渐接近于0,并且是类cos的形状(cos2)
重参数 :由于采样的操作不可导,无法反传梯度,实际实现的时候,要用重参数(随机采样->确定函数+独立随机噪声)使得其可微,转换前的xt为:
xt=N(xt;αˉtx0,(1−αˉt)I)
重参数:1)x∼N(μ,σ2),2)x=μ+σ⋅ε,ε∼N(0,1)两者等价,但后者可微
累加性:由于是加法,可以一步计算t时刻的噪声图像,不用多步扩散:
xt=αˉt⋅x0+1−αˉt⋅ϵ
证明:
由于
xt=αt⋅xt−1+1−αt⋅ϵ
那么,
xt=αt(αt−1⋅xt−2+1−αt−1⋅ϵ)+1−αt⋅ϵ=αtαt−1⋅xt−2+αt1−αt−1⋅ϵ+1−αt⋅ϵ
后一项的括号中本质上是两个正态分布的相加,由叠加性可以得到:
X1∼αt1−αt−1ϵ=N(0,αt(1−αt−1))X2∼1−αtϵ=N(0,1−αt)X1+X2=N(0,1−αtαt−1)
那么,上式就为:
xt=αtαt−1xt−2+(1−αtαt−1)ϵ
后面的就可以用归纳法推导,由此q(xt∣x0)仍是一个高斯分布
后向去噪
前向过程是高斯分布,后向过程也是高斯分布,后向过程可以表示为(即xt已知,只需要学条件概率):
pθ(xt−1∣xt)=N(μθ(xt,t),σt2I)
其中,θ可以表示为神经网络的参数
对于其中的均值和方差:
方差:通过数学推导,方差可以直接取σt2=βt(或者更精确的σt2=1−αˉt1−αˉt−1⋅βt),只需要学习均值
均值:均值可以转化为:
μθ(xt,t)=1−αˉtαt(1−αˉt−1)⋅xt+1−αˉtαˉt−1⋅βt⋅x^0(xt,t)
其中,x^0(xt,t)是模型预测的原始x0值,由此,均值只和x^0有关(xt已知),那么模型的学习就是从已有的信息和时间t中预测原始图片的预测项x^0
代入
x0=αˉt1(xt−1−αˉtϵt)
那么,均值就可以写为:
μ~t=αt1(xt−1−αˉt1−αtεt)
那么均值只和超参数αt,αˉt,xt,εt有关
目标函数
后向去噪过程可以知道,目标可以转换为xt的分布->xt条件下xt−1的概率->均值->εt,转换为高斯噪声的分布
利用贝叶斯定理和琴生不等式,采用最大化证据下界的方法可以推导,写为:
Lsimple =Et,x0,ϵϵt−ϵ^θ(αˉtx0+1−αˉtϵ,t)2
其中,ϵ^θ(xt,t)就是一个神经网络,预测噪声
条件生成
可以随机采集一个条件噪声,然后逐步去噪(也还是重参数化):
xt−1=αt1(xt−1−αˉt1−αtϵ(xt,t))+σtz
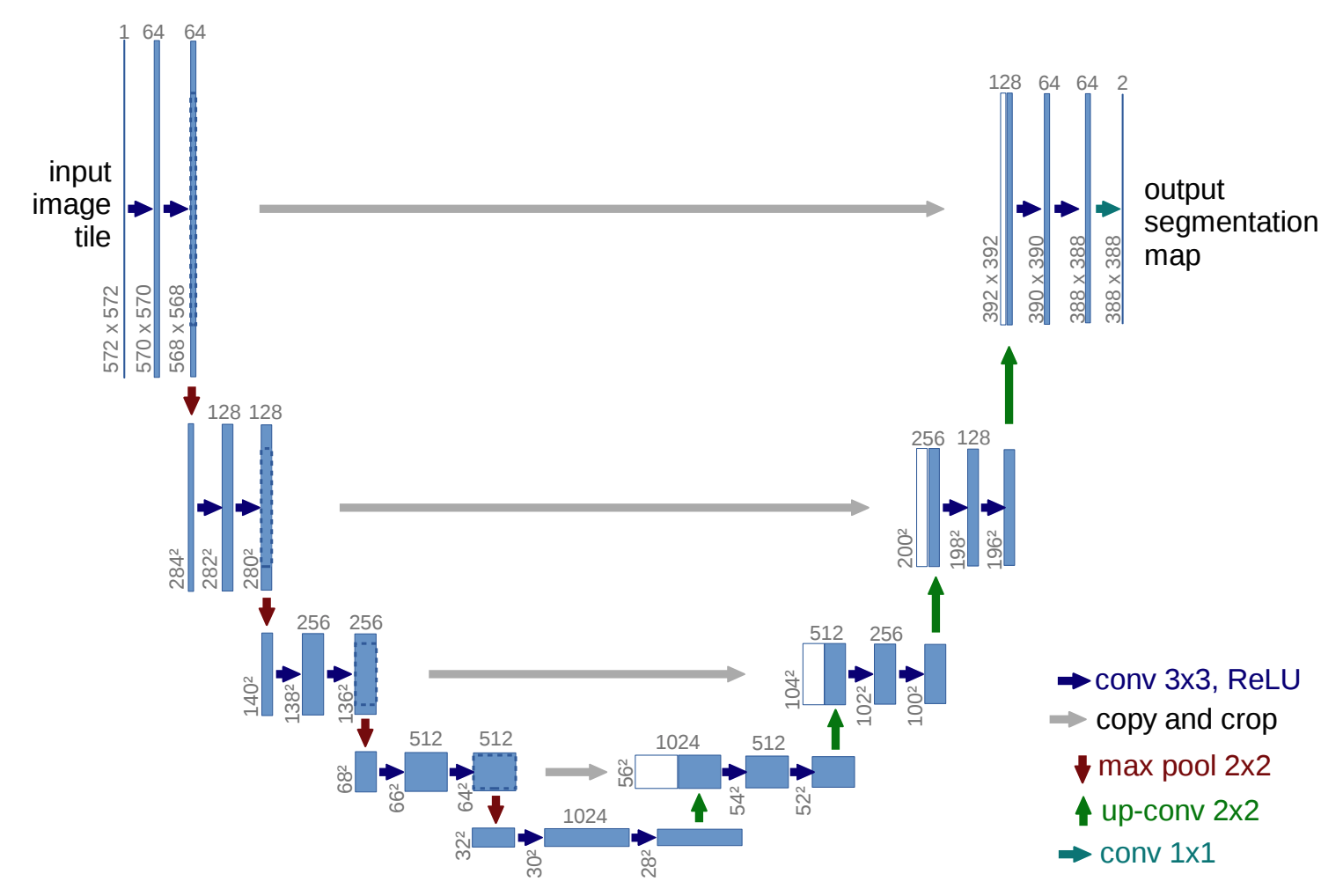
使用U-Net的DDPM
结构
DDPM最初选择的是U-Net来预测噪声,包含编码器,解码器和残差链接。
宽残差卷积:DDPM中也对卷积做出了改进,使用宽残差网络作为核心结构
一般有两种残差结构,Unet的DDPM使用后一种:
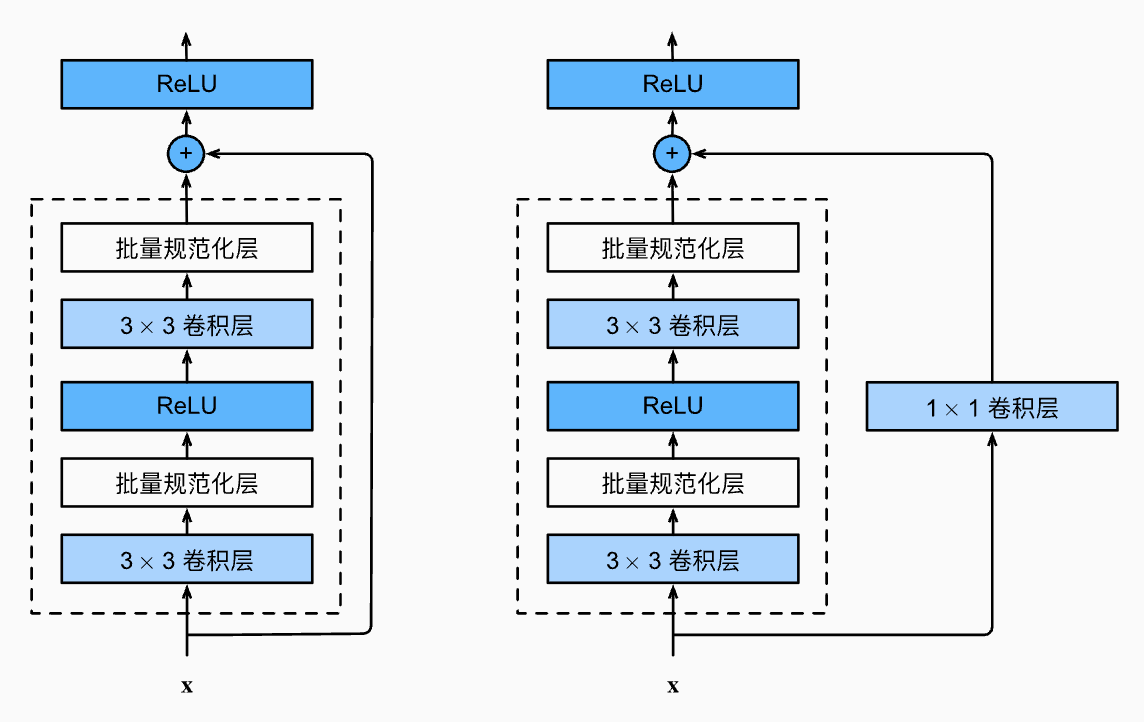
宽残差网络(WRN):
增加一个宽度因子,通道数变为原始通道数×宽度因子,具有更浅的宽度,并在卷积层中间加入dropout
优势:训练快,更容易并行,过拟合风险更小
注意在基于Unet的DDPM的实现中,一般会尽量使用残差链接(每个block都有残差链接),而非传统UNet中每个分辨率做残差链接
使用ConvNext也能获得更好的性能提升
时间编码:为了区分不同的时间片,加入正弦位置嵌入
注意力引入:通常在低分辨率的卷积层之间,会加入注意力层
组归一化
classifier-free引导生成:让同一个去噪网络同时学会“有条件”和“无条件”的去噪,然后在生成时把两者做线性外推来加强条件信号
缺点
DDPM通过直接在图像像素空间中进行操作实现了图像生成任务,但由于链式特性,训练和推理都很消耗资源
DDIM(Denoising Diffusion Implicit Models)
只需要对于采样器进行修改(逐步的马尔可夫过程->可重参数化,任意时间离散的非马尔可夫过程),实现间隔多步采样
原理
在反向去噪的过程中,DDPM定义为一个马尔可夫链:
pθ(x0:T)=p(xT)t=1∏Tpθ(xt−1∣xt)
同时发现后验分布可以表示为一个高斯分布:
q(xt−1∣xt,x0)=N(xt−1;μ~t(xt,x0),β~tI)
这里,后验概率q(xt−1∣xt,x0)实际上是由q(xt∣xt−1)和马尔可夫性经过贝叶斯公式推导出来的
而其目标为:
Lsimple =Et,x0,ϵϵt−ϵ^θ(αˉtx0+1−αˉtϵ,t)2
但我们从损失出发可以发现,优化目标只依赖于边缘分布q(xt∣x0)(只包含单个时间步,不包含中间路径),而非整个联合分布q(x1:T∣x0)(包含整个扩散的路径的概率),由此可以直接定义q(xt−1∣xt,x0)解除马尔可夫约束
也就是说,只需要q(xt−1∣xt)已知,而且是高斯分布的形式,就可以用DDPM的目标函数来训练模型
由此,DDIM将前向过程的联合分布重新定义为:
qσ(x1:T∣x0)=qσ(xT∣x0)t=2∏Tqσ(xt−1∣xt,x0)
其中,σ为一个实数超参数,对于t=0,qσ(xT∣x0)=N(αTx0,(1−αT)I)与DDPM中的相同,仍为高斯分布,对t>1,定义:
qσ(xt−1∣xt,x0)=N(αt−1x0+1−αt−1−σt2⋅1−αtxt−αtx0,σt2I)
由此,对于任意时刻,qσ(xt∣x0)=N(αtx0,(1−αt)I)都满足(为高斯分布)
respacing
基于DDIM,就可以采用respacing进行加速(性能损耗较小)
可以在[1, …, T]的范围(训练时),可以采样一个子集{xτ1,…,xτS}来进行生成